As part of our OpenROV effort, we are using the Raspberry Pi as the core and the Raspi camera module as the sensor. First task is to get streaming video working!
Streaming video on the Raspberry Pi
Leave a reply
As part of our OpenROV effort, we are using the Raspberry Pi as the core and the Raspi camera module as the sensor. First task is to get streaming video working!
The 1MZ powered AW11 MR2 debuted at the Halloween Hooptifest at NHMS. I didn’t update here for a while due to working on the car around the clock to get it ready!

For our 1MZ swap into our lemons car we wanted to just use the Avalon dashboard since then no engine sensors will need to be swapped. The main issues with this are the fuel gauge sensor and the speedometer (since they are non Avalon parts). The fuel guage so far seems to “work” but we will see what the range is once we fill the tank. The speedo is a problem since the S54 transmission (from a Celica) uses a cable drive speedometer and the ’97 avalon uses an electronic speedo. With a little modification we found the avalon sender could be fit into the S54.

Finally finished the engine mounts for our 1MZ into AW11 Toyota MR2 swap. Most of them were made from bits of the old AW11 engine mounts which seems to have worked just fine.
After I burned out the LED driver on my driver board my LED tail light project has been sitting for a while. I replaced the driver chip on the driver board and it was back in action. Still not sure why it blew out in the first place though (highly suspect) but it could have just gotten shorted or otherwise “mechanically compromised” since it was just sitting in the compartment under the seat. This time around I wrapped it in a great deal of electrical tape!
When I first bought my 1985 190E 2.3-16v (back in 2010), the A/C worked. It didn’t work all that well though, and I assumed it was a bit low on refrigerant. It spent a year or so up on blocks while I did a bunch of things to it which should not have taken a year, but after getting it back on the road the A/C no longer worked. Inspection showed that the system was completely empty now (zero pressure at all).
After our extreme 4AGE failure at the last race we decided to go forward with our engine swap project. After visiting the junkyard and researching online we settled on an early model 1MZFE engine. At my favourite u-pull-it junkyard (Henry’s Used Auto Parts in Blackstone, MA) there were around 25 of these engines available. Most were in Avalon’s but some in Camry’s or ES300’s. We settled on a ’97 unit which was mostly complete and had only 115k miles. Some of the Avalon’s there had over 350k, so this one should last us quite a while!

We just completed our second 24 Hours of Lemons race last weekend. We ran the Real Hoopties of New Jersey 2013 race which was in Millville, NJ Aug 10/11. We previously ran the Loudon Annoying race at the New Hampshire Motor Speedway.
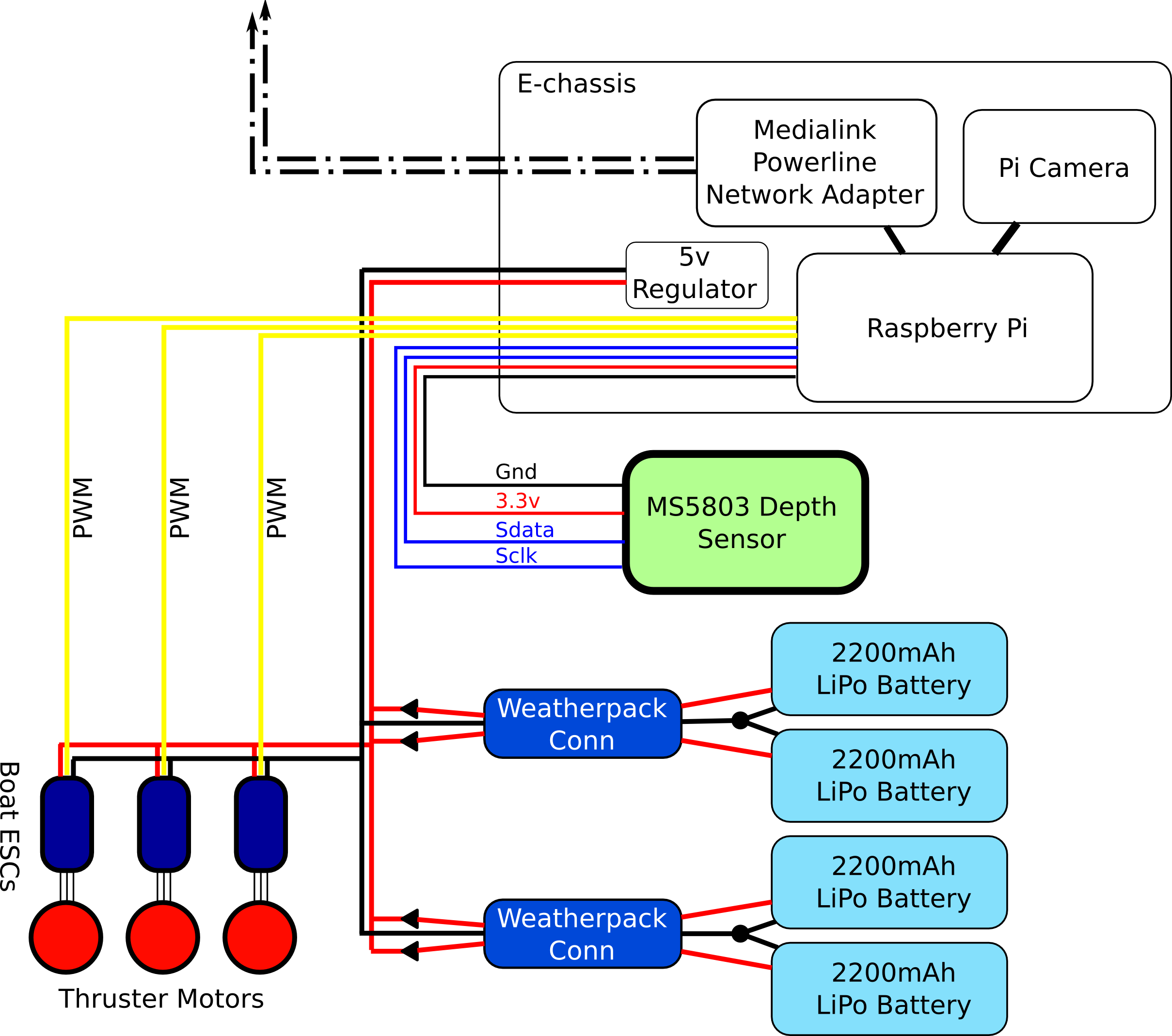
After some thought into our design, I drew up a schematic for Avi’s OpenROV. This reflects all the changes we are making electrically:
A lot of changes! Here is the current schematic diagram. There are currently 11 wires passing through the bulkhead that have to be potted, which is much less than the current OpenROV mostly due to having the ESCs out in the water.