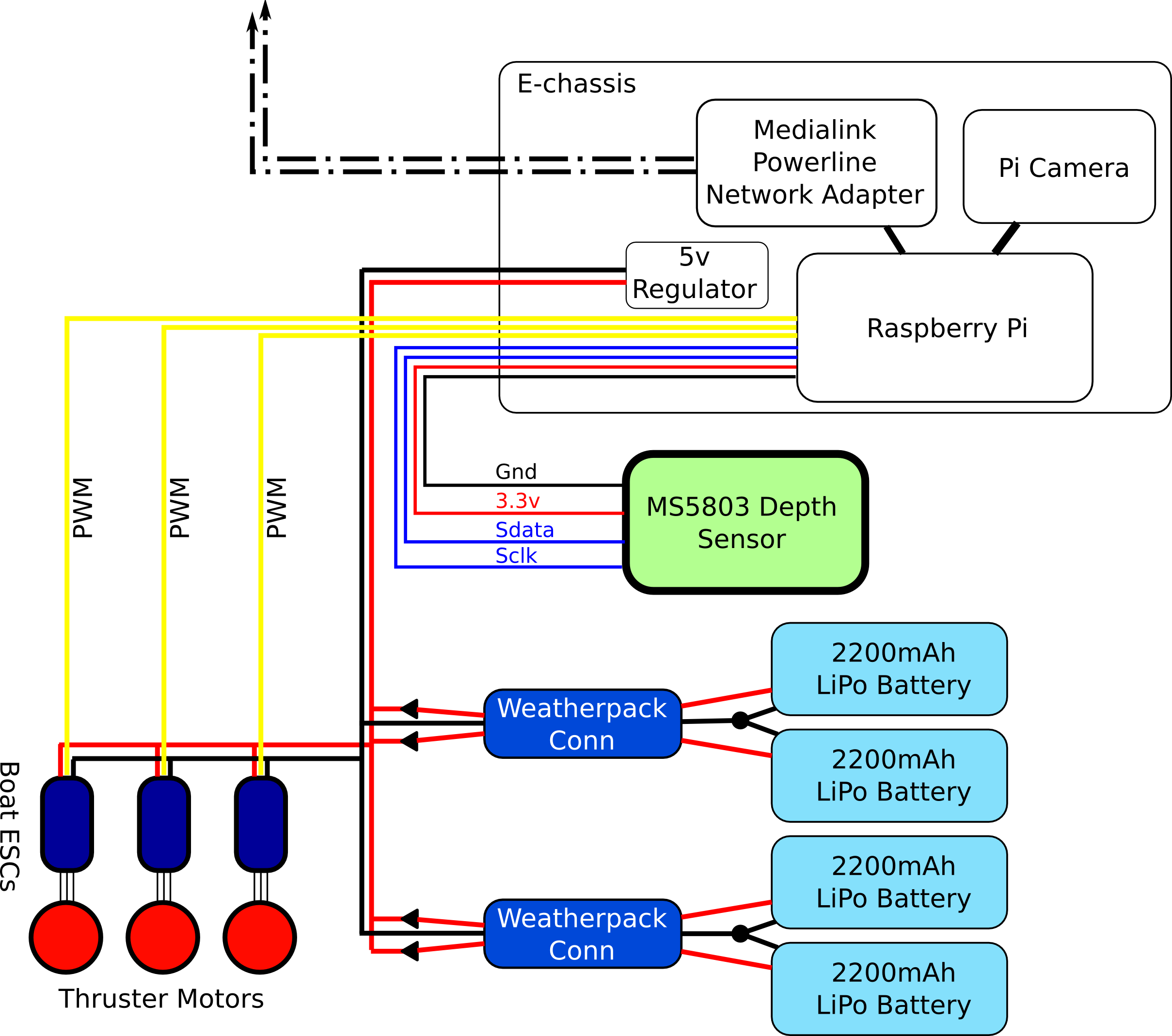
After some thought into our design, I drew up a schematic for Avi’s OpenROV. This reflects all the changes we are making electrically:
- Using waterproof boat ESCs and moving them from the e-chassis into the water
- Switching to Raspberry Pi from the Beaglebone
- Not using the OpenROV cape – we will drive the ESCs directly with the RaspberryPi using ServoBlaster
- Adding the MS5803-14b depth sensor – i2c interface, runs on 3.3v
- Switching to four 3S 2200mAh lithium polymer batteries from the cylindrical cells used on the OpenROV right now
- Using the RaspberryPi camera module instead of a webcam
A lot of changes! Here is the current schematic diagram. There are currently 11 wires passing through the bulkhead that have to be potted, which is much less than the current OpenROV mostly due to having the ESCs out in the water.