Hello I am Avi Moore writing about my mini submersible summer project. The submersible is an opensource project that was developed by two people that wanted to find some gold in a cave lake, they ended up not actually finding any gold but instead found themselves developing a new piece of technology. I got the idea to build the ROV because I read about the people that developed it in Make Magazine (http://www.makershed.com) and I was inspired to make the open ROV.
Later I found the parts list and started searching online for all the parts. Most of the parts were easy to find but some, like the 100 meter twisted wire were vary hard to find. Two days ago the hobby parts that I ordered came in the mail (below). I still haven’t ordered some parts that come from amazon because they get here really fast, but the hobby parts that come from China are all here.
We are going to have to do a bit of modification to the ROV because we are not using all of the same parts as the ROV creators. The biggest difference is that we are using a raspberry pi and they used the beaglebone board.
Today I did a lot of very hard CAD’ing and learned that Autodesk Inventor doesn’t have document recovery, I learned this by doing the same design about three times. Today I also ordered all the parts that will be here tomorrow.

This is the starboard thruster that is a ducted fan instead of the custom acrylic tube thruster that the creators used.

This is the brushless speed controller that is for a boat so it can be mounted on the outside of the electronics tube.
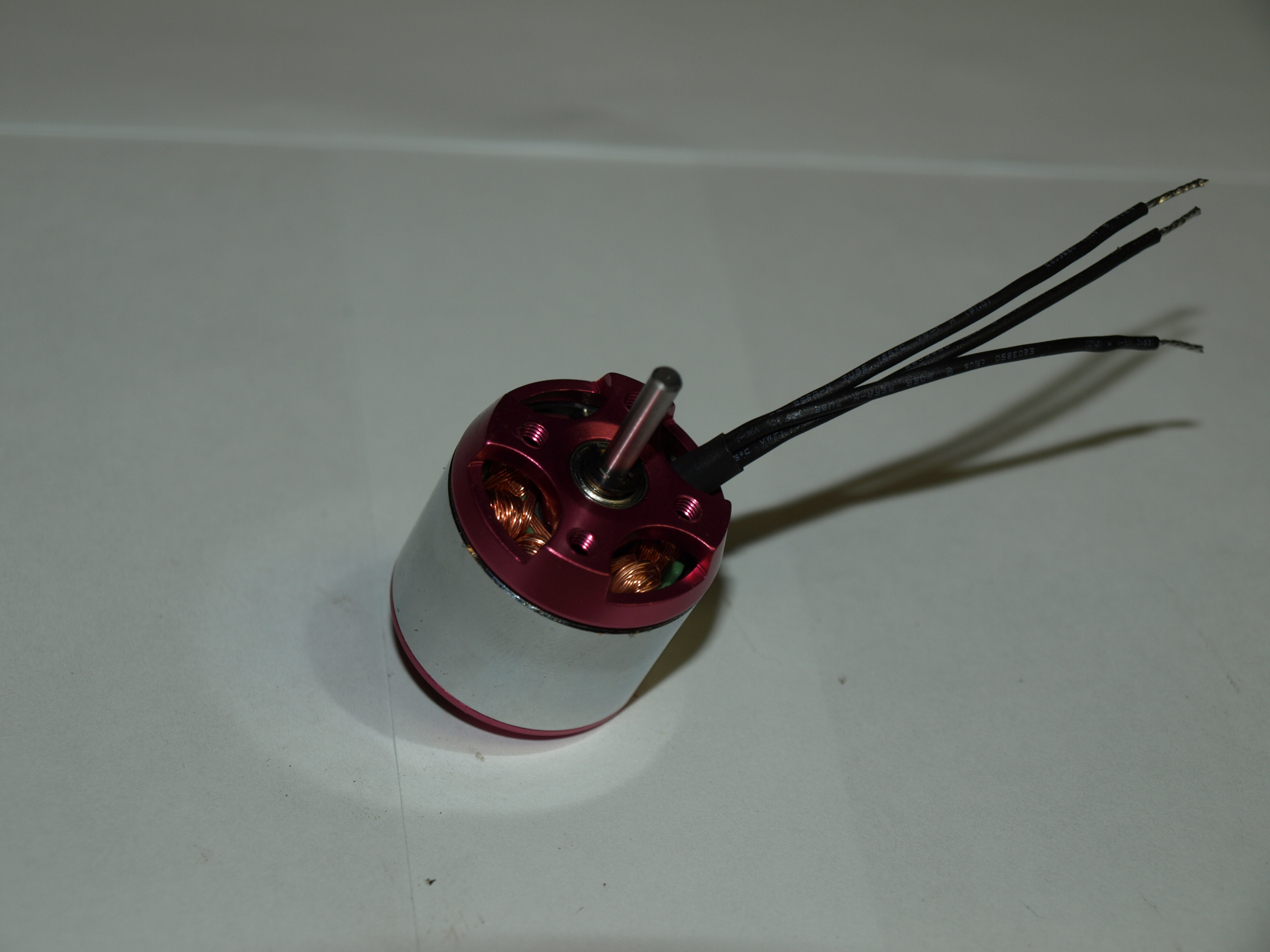
This is the brushless motor from Hobby King that manages 4000 RPM that will be running the forward and vertical thrusters.

This is the disassembled ducted fan from Hobby King that will be run by our motor.



The three photos above are all tests for the motor one in air and one for water back and forth.
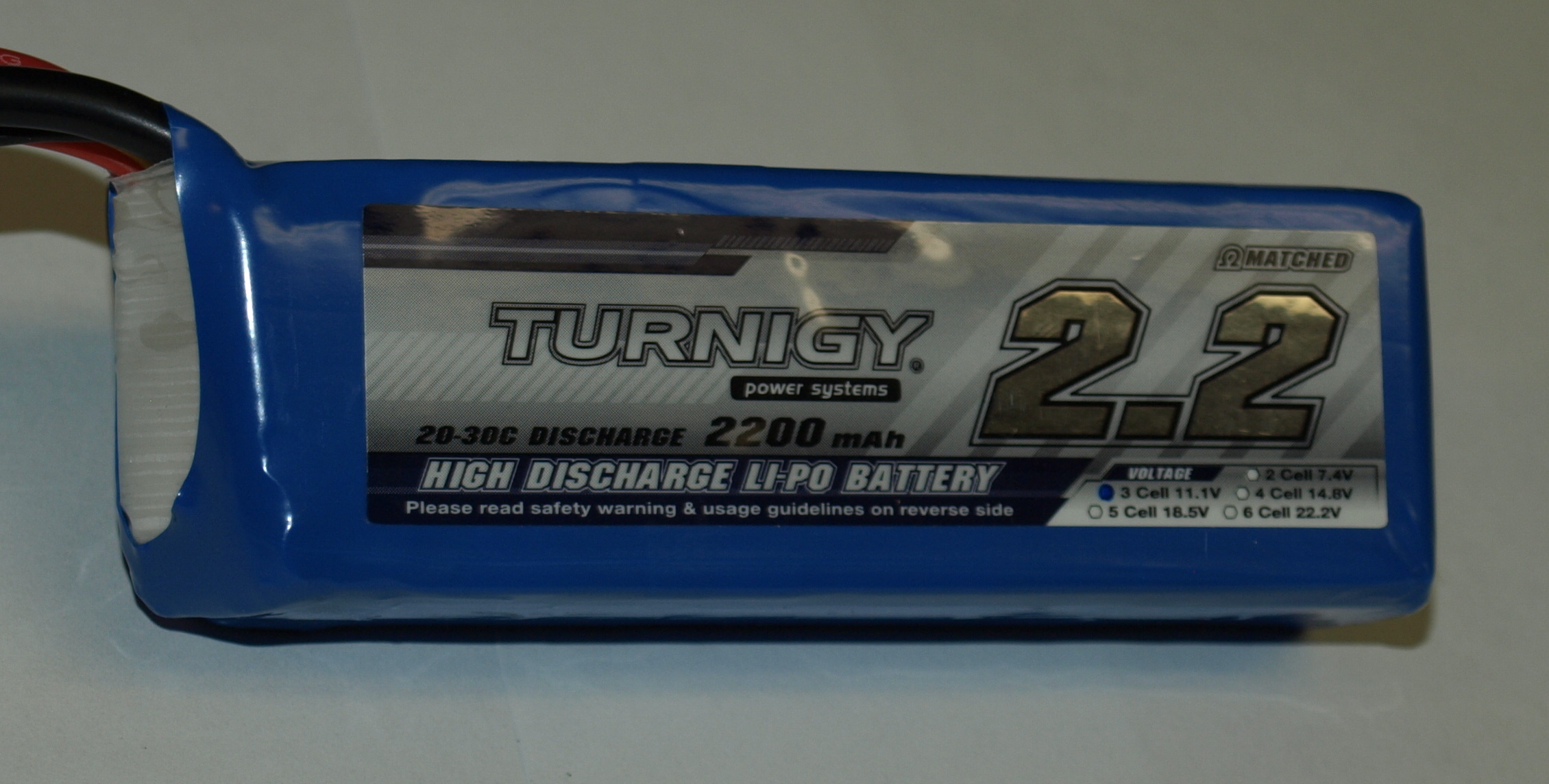
This is one of the four bigger batteries that we have to run the ROV for about 2 hours.